13. Turtlesim Comms: List Topics
Turtlesim Comms: List Topics
Turtlesim Comms: List Topics
Listing All Topics
In a similar fashion, we are able to query the ROS Master for a list of all topics. To do so, we use the command
rostopic list
.
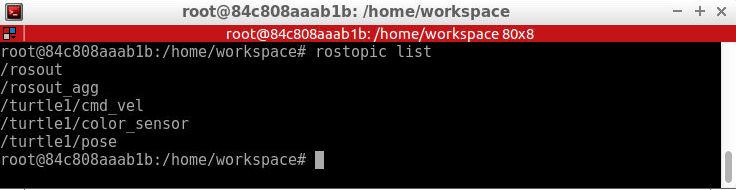
-
/rosout_agg: Aggregated feed of messages published to /rosout. -
/turtle1/cmd_vel: Topic on which velocity commands are sent/received. Publishing a velocity message to this topic will command turtle1 to move. -
/turtle1/color_sensor: Each turtle in turtlesim is equipped with a color sensor, and readings from the sensor are published to this topic. -
/turtle1/pose: The position and orientation of turtle1 are published to this topic.